Tweenbots - Using Anthropomorphic Objects to create a social network
Page 1 of 1

Tweenbots - Using Anthropomorphic Objects to create a social network
![]() byroncheng Sat Apr 11, 2009 7:33 pm
byroncheng Sat Apr 11, 2009 7:33 pm
Tweenbots
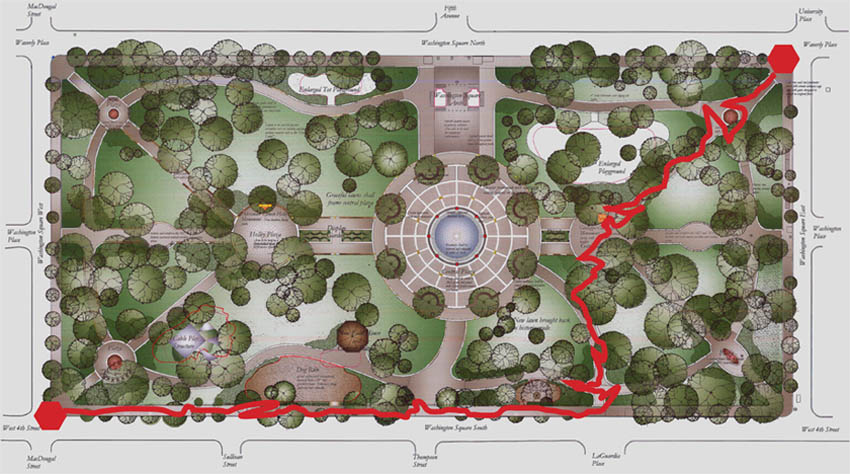
In this experiment, a robot starts in a corner of the partk and needs to get to the opposite corner. It has a sign saying this, and just rolls forwards. The project relied on people to direct the robot in the correct direction.
This has some similarities and differences from our class experiment with the ball. In that game, we knew where we wanted to start and finish, and had defined edges and nodes. Students would throw the ball to people they thought might know the target. These people could be closer or further from the target. However, as time went on, the futility of the exercise was realized and the ball was passed directly in the direction of the target.
In the experiment, it starts from the direct passing portion of our game. However, what differs is that although the robot is generally directed in the right direction, the fact is that it is small, and not very accurate. Therefore robot defines its own "wavy" edges (as it veers off course), which in a sense, link unintended nodes.
Another comparison is that in class, we work with an already existing social network, where we have strong links with our friends. The robot is in the progress of creating its social network, growing at the fastest rate possible (each time they meet someone, it is someone new who (in theory) does not know any of the others).
The robot was redirected by 29 people and took 42 minutes to get to its destination.
In this experiment, a robot starts in a corner of the partk and needs to get to the opposite corner. It has a sign saying this, and just rolls forwards. The project relied on people to direct the robot in the correct direction.
This has some similarities and differences from our class experiment with the ball. In that game, we knew where we wanted to start and finish, and had defined edges and nodes. Students would throw the ball to people they thought might know the target. These people could be closer or further from the target. However, as time went on, the futility of the exercise was realized and the ball was passed directly in the direction of the target.
In the experiment, it starts from the direct passing portion of our game. However, what differs is that although the robot is generally directed in the right direction, the fact is that it is small, and not very accurate. Therefore robot defines its own "wavy" edges (as it veers off course), which in a sense, link unintended nodes.
Another comparison is that in class, we work with an already existing social network, where we have strong links with our friends. The robot is in the progress of creating its social network, growing at the fastest rate possible (each time they meet someone, it is someone new who (in theory) does not know any of the others).
The robot was redirected by 29 people and took 42 minutes to get to its destination.
byroncheng- Posts : 30
Join date : 2009-03-31
» Create your own social network!!!
» 700 Friends and Drinking Alone
» The Facebook Social Network
» Social Network Visualization
» WoW Social Network Site
» 700 Friends and Drinking Alone
» The Facebook Social Network
» Social Network Visualization
» WoW Social Network Site
Page 1 of 1
Permissions in this forum:
You cannot reply to topics in this forum|
|
|